图相关的算法
图相关算法
- 图的概念
- 由点的集合和边的集合构成
- 虽然存在有向图和无向图的概念,
- 但实际上都可以用有向图来表达
- 无向图可以理解为两个联通点互相指向
- 边上可能带有权值
- 图的表示方法(连接与否,权重)
- 邻接表表示法(代价可封装上去)
- 从A点出发能到的直接邻居
- 邻接矩阵表示法(全连接)
- 列二维表格,表格中填写权重,如果AB不相邻,就是正无穷
- 其他方式
- 笔试面试常见结构:边的权重,从from节点指向to节点
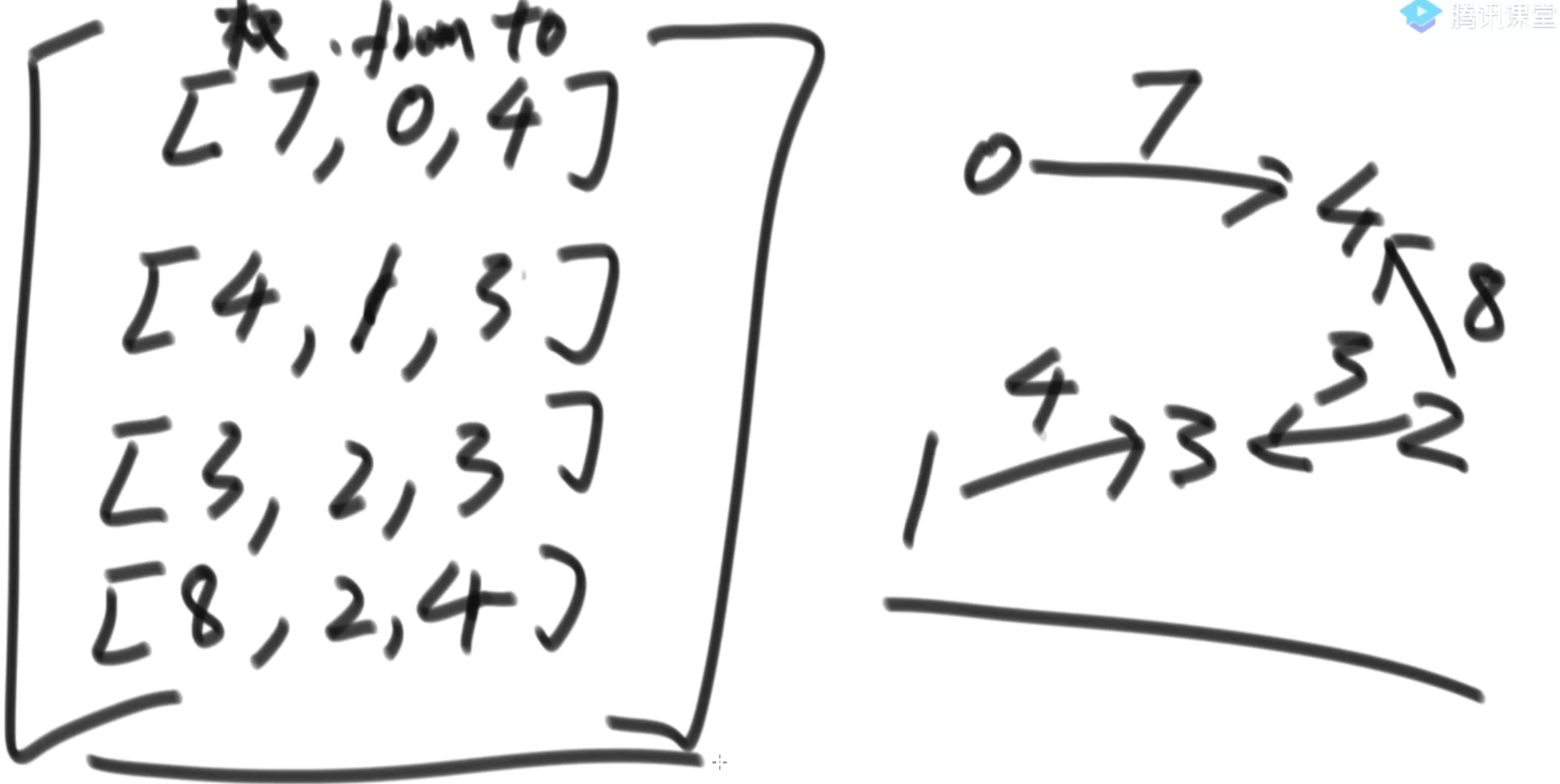
- 图的结构有很多,我们确定一种自己熟悉的图结构,以不变应万变,无论来的什么结构,写一个转换类,任意图结构的描述,都向我们上述的图结构转化:
- 邻接表表示法(代价可封装上去)
- 大一统图图
- 点结构的描述:
- 边结构的描述:
- 图结构的描述:
- 图算法并不难,难点在于图有很多种表示方式,表达一张图的篇幅比较大,coding容易出错。我们的套路就是
- 先用自己最熟练的方式,实现图结构的表达
- 在自己熟悉的结构上,实现所有常用的图算法作为模板
- 把面试题提供的图结构转化为自己熟悉的图结构,再调用模板或改写即可
图的遍历
宽度优先遍历BFS
- (
Code01_BFS)- 利用队列实现
- 从源节点开始依次按照宽度进队列,然后弹出
- 每弹出一个点,把该节点所有没有进过队列的邻接点放入队列
- 直到队列变空
- 宽度优先的思路:实质先遍历自己,再遍历自己的下一跳节点(同一层节点的顺序无需关系),再下下跳节点…
- 步骤实现:我们从A点开始遍历:
- A进队列–> Q[A];A进入Set–> S[A]
- A出队:Q[],打印A;A直接邻居为BCD,都不在Set中,进入队列Q[D,C,B], 进入S[A,B,C,D]
- B出队:Q[D,C], B有CE三个邻居,C已经在Set中, 放入E, S[A,B,C,D,E],队列放E, Q[E,D,C]
- C出队,周而复始
深度优先遍历DFS
Code02_DFS- 利用栈实现
- 从源节点开始把节点按照深度放入栈,然后弹出
- 每弹出一个点,把该节点下一个没有进过栈的邻接点放入栈
- 直到栈变空
- 深度优先思路:表示从某个节点一直往下深入,知道没有路了,返回。我们的栈实质记录的是我们深度优先遍历的路径
- 步骤实现:我们从A点开始遍历:
- A进栈,Stack[A] 打印A。弹出A,当前弹出的节点A去枚举它的后代BCD,B没加入过栈中。压入A再压入B,Stack[B,A]。打印B
- 弹出B,B的直接后代邻居为CE,C再栈中而E不在栈中。重新压B,压E,Stack[E,B,A]。打印E
- 弹出E,E有邻居D,D不在栈中。压回E,再压D,此时Stack[D,E,B,A]。打印D
- 弹出D,D的直接邻居是A,A已经在栈中了。说明A-B-E-D这条路径走到了尽头。弹出D之后,当前循环结束。继续while栈不为空,重复操作
图的拓扑排序
- 解释:当前工作需要依赖之前的工作(需要前面工作都完成)
- 在图中找到所有入度为0的点输出
- 把所有入度为0的点在图中删掉,消除这些点的边的影响。继续找入度为0的点输出,删除,消边,周而复始
- 图的所有点都被删除后,依次输出的顺序就是图的拓扑排序
- 要求:有向图且其中没有环
- 应用:事件安排,编译顺序
- 代码
// 有向无环图,返回拓扑排序的顺序list public static List<Node> sortedTopology(Graph graph) { // key:某一个node // value:该节点剩余的入度 HashMap<Node, Integer> inMap = new HashMap<>(); // 只有剩余入度为0的点,才能进这个队列 Queue<Node> zeroInQueue = new LinkedList<>(); // 拿到该图中所有的点集 for (Node node : graph.nodes.values()) { // 初始化每个点,每个点的入度是原始节点的入度信息 // 加入inMap inMap.put(node, node.in); // 由于是有向无环图,则必定有入度为0的起始点。放入到zeroInQueue if (node.in == 0) { zeroInQueue.add(node); } } // 拓扑排序的结果,依次加入result List<Node> result = new ArrayList<>(); while (!zeroInQueue.isEmpty()) { // 该有向无环图初始入度为0的点,直接弹出放入结果集中 Node cur = zeroInQueue.poll(); result.add(cur); // 该节点的下一层邻居节点,更新:入度减1 for (Node next : cur.nexts) { inMap.put(next, inMap.get(next) - 1); // 如果下一层存在入度变为0的节点,加入到0入度的队列中 if (inMap.get(next) == 0) { zeroInQueue.add(next); } } } return result; }
图的最小生成树算法
最小生成树解释
- 就是在不破坏原有图点与点的连通性基础上,让连通的边的整体权值最小。返回最小权值或者边的集合
Kruskal(克鲁斯卡尔)算法:连通性借助并查集实现
- 先把所有边,根据权值,由小到大排序,总是从权值最小的边开始考虑,依次考察权值依次变大的边
- 当前的边
- 要么进入最小生成树的集合:如果当前的边进入最小生成树的集合中不会形成环,就要当前边
- 要么丢弃:如果当前的边进入最小生成树的集合中会形成环,就不要当前边
- 考察完所有边之后,最小生成树的集合也就得到了
- 代码分为两部分,一部分是并查集,一部分是Kruskal
// K算法 public static Set<Edge> kruskalMST(Graph graph) { // 先拿到并查集结构 UnionFind unionFind = new UnionFind(); // 该图的所有点加入到并查集结构 unionFind.makeSets(graph.nodes.values()); // 边按照权值从小到大**排序**,加入到小根堆 PriorityQueue<Edge> priorityQueue = new PriorityQueue<>(new EdgeComparator()); for (Edge edge : graph.edges) { // M 条边 priorityQueue.add(edge); // O(logM) } Set<Edge> result = new HashSet<>(); // 堆不为空,弹出小根堆的堆顶 while (!priorityQueue.isEmpty()) { // 假设M条边,O(logM) Edge edge = priorityQueue.poll(); // 如果该边的左右两侧不在同一个集合中 if (!unionFind.isSameSet(edge.from, edge.to)) { // O(1) // 要这条边 result.add(edge); // 联合from和to unionFind.union(edge.from, edge.to); } } return result; }
Prim算法
- P算法无需并查集结构,普通set即可满足
- 过程(有两个东西:被解锁的点,被解锁的边)
- 任意指定一个出发点,譬如A,A的直接边被解锁
- 在A解锁的边里选择一个最小的边,该边两侧有没有新节点,如果有选择该边,没有就舍弃该边
- 在被选择的新节点中再解锁该节点的直接边
- 周而复始,直到所有点被解锁
- 代码
public static class EdgeComparator implements Comparator<Edge> { @Override public int compare(Edge o1, Edge o2) { return o1.weight - o2.weight; } } public static Set<Edge> primMST(Graph graph) { // 解锁的边进入小根堆 PriorityQueue<Edge> priorityQueue = new PriorityQueue<>(new EdgeComparator()); // 哪些点被解锁出来了 HashSet<Node> nodeSet = new HashSet<>(); // 已经考虑过的边,不要重复考虑 Set<Edge> edgeSet = new HashSet<>(); // 依次挑选的的边在result里 Set<Edge> result = new HashSet<>(); // 随便挑了一个点,进入循环处理完后直接break for (Node node : graph.nodes.values()) { // node 是开始点 if (!nodeSet.contains(node)) { // 开始节点保留 nodeSet.add(node); // 开始节点的所有邻居节点全部放到小根堆 // 即由一个点,解锁所有相连的边 for (Edge edge : node.edges) { // 没加入到小根堆的边,才会加入(最终,所有边都会加入) if (!edgeSet.contains(edge)) { edgeSet.add(edge); priorityQueue.add(edge); } } while (!priorityQueue.isEmpty()) { // 弹出解锁的边中,最小的边 Edge edge = priorityQueue.poll(); // 可能的一个新的点,from已经被考虑了,只需要看to Node toNode = edge.to; // 如果发现to不在集合中,就是新的点,加入已解锁点集合,并且把边加入结果 if (!nodeSet.contains(toNode)) { nodeSet.add(toNode); result.add(edge); for (Edge nextEdge : toNode.edges) { // 没加过的,放入小根堆 if (!edgeSet.contains(nextEdge)) { edgeSet.add(nextEdge); priorityQueue.add(nextEdge); } } } } } // 直接break意味着我们不用考虑森林的情况 // 如果不加break我们可以兼容多个无向图的森林的生成树 // break; } return result; }
图的最短路径算法
Dijkstra(迪杰特斯拉)算法
- 求解单元点的最短路径问题:给定带权有向图G和源点v,求v到G中其他顶点的最短路径
- 限制条件:图G中不存在负权值的边
步骤
- Dijkstra算法必须指定一个源点
- 生成一个源点到各个点的最小距离表,一开始只有一条记录,即原点到自己的最小距离为0,源点到其他所有点的最小距离都是∞正无穷大
- 从距离表中拿出没拿过记录里的最小记录,通过这个点出发的边,更新源点到各个点的最小距离表,不断重复这一步
- 源点到所有的点记录如果都被拿过一遍,过程停止,最小距离表得到了

另一种描述:
- 不断运行广度优先算法找可见点,计算可见点到源点的距离长度
- 从当前已知的路径中选择长度最短的将其顶点加入S作为确定找到的最短路径的顶点。
代码:未优化:更新表单采用正常找最小
// 返回的map表就是从from到表中每个key的最小距离 // 某个点不在map中记录,则from到该点位正无穷 public static HashMap<Node, Integer> dijkstra1(Node from) { // 从from出发到所有点的最小距离表 HashMap<Node, Integer> distanceMap = new HashMap<>(); // from到from距离为0 distanceMap.put(from, 0); // 已经求过距离的节点,存在selectedNodes中,以后再也不碰 HashSet<Node> selectedNodes = new HashSet<>(); // from 0 得到没选择过的点中的最小距离 Node minNode = getMinDistanceAndUnselectedNode(distanceMap, selectedNodes); // 得到minNode之后 while (minNode != null) { // 把minNode对应的距离取出,此时minNode就是桥连点 就是 原点---桥连点 的距离 int distance = distanceMap.get(minNode); // 把minNode上所有的邻边拿出来 // 这里就是要拿到例如A到C和A到桥连点B再到C哪个距离小的距离 for (Edge edge : minNode.edges) { // 某条边对应的下一跳节点toNode Node toNode = edge.to; // 如果关于from的distencMap中没有去toNode的记录,表示正无穷,直接添加该条 if (!distanceMap.containsKey(toNode)) { // 如果没有,直接添加 // from到minNode的距离 加上 minNode到当前to节点的边距离 distanceMap.put(toNode, distance + edge.weight); // 如果有,看该距离是否更小,更小就更新 } else { // 老的距离,取代,新的距离 distanceMap.put(edge.to, Math.min(distanceMap.get(toNode), distance + edge.weight)); } } // 锁上minNode,表示from通过minNode到其他节点的最小值已经找到 // minNode将不再使用 selectedNodes.add(minNode); // 再在没有选择的节点中挑选MinNode当成from的桥接点 minNode = getMinDistanceAndUnselectedNode(distanceMap, selectedNodes); } // 最终distanceMap全部更新,返回 return distanceMap; } // 得到没选择过的点的最小距离 public static Node getMinDistanceAndUnselectedNode( HashMap<Node, Integer> distanceMap, HashSet<Node> touchedNodes) { Node minNode = null; int minDistance = Integer.MAX_VALUE; // 遍历该表,确保没有被选过,并且距离最小 for (Entry<Node, Integer> entry : distanceMap.entrySet()) { Node node = entry.getKey(); int distance = entry.getValue(); // 没有被选择过,且距离最小 if (!touchedNodes.contains(node) && distance < minDistance) { minNode = node; minDistance = distance; } } // 抓出来这个点,返回 return minNode; }更新后的代码:更新表单采用自己写的小根堆
- 自定义小根堆
- dijkstra过程
// 自定义小根堆结构
// 需要提供add元素的方法,和update元素的方法
// 需要提供ignore方法,表示我们已经找到from到某节点的最短路径
// 再出现from到该节点的其他路径距离,我们直接忽略
public static class NodeHeap {
private Node[] nodes; // 实际的堆结构
// key 某一个node, value 上面堆中的位置
// 如果节点曾经进过堆,现在不在堆上,则node对应-1
// 用来找需要ignore的节点
private HashMap<Node, Integer> heapIndexMap;
// key 某一个节点, value 从源节点出发到该节点的目前最小距离
private HashMap<Node, Integer> distanceMap;
private int size; // 堆上有多少个点
public NodeHeap(int size) {
nodes = new Node[size];
heapIndexMap = new HashMap<>();
distanceMap = new HashMap<>();
size = 0;
}
// 该堆是否空
public boolean isEmpty() {
return size == 0;
}
// 有一个点叫node,现在发现了一个从源节点出发到达node的距离为distance
// 判断要不要更新,如果需要的话,就更新
public void addOrUpdateOrIgnore(Node node, int distance) {
// 如果该节点在堆上,就看是否需要更新
if (inHeap(node)) {
distanceMap.put(node, Math.min(distanceMap.get(node), distance));
// 该节点进堆,判断是否需要调整
insertHeapify(node, heapIndexMap.get(node));
}
// 如果没有进入过堆。新建,进堆
if (!isEntered(node)) {
nodes[size] = node;
heapIndexMap.put(node, size);
distanceMap.put(node, distance);
insertHeapify(node, size++);
}
// 如果不在堆上,且进来过堆上,什么也不做,ignore
}
// 弹出from到堆顶节点的元素,获取到该元素的最小距离,再调整堆结构
public NodeRecord pop() {
NodeRecord nodeRecord = new NodeRecord(nodes[0], distanceMap.get(nodes[0]));
// 把最后一个元素放在堆顶,进行heapify
swap(0, size - 1);
heapIndexMap.put(nodes[size - 1], -1);
distanceMap.remove(nodes[size - 1]);
// free C++同学还要把原本堆顶节点析构,对java同学不必
nodes[size - 1] = null;
heapify(0, --size);
return nodeRecord;
}
private void insertHeapify(Node node, int index) {
while (distanceMap.get(nodes[index])
< distanceMap.get(nodes[(index - 1) / 2])) {
swap(index, (index - 1) / 2);
index = (index - 1) / 2;
}
}
private void heapify(int index, int size) {
int left = index * 2 + 1;
while (left < size) {
int smallest = left + 1 < size && distanceMap.get(nodes[left + 1]) < distanceMap.get(nodes[left])
? left + 1
: left;
smallest = distanceMap.get(nodes[smallest])
< distanceMap.get(nodes[index]) ? smallest : index;
if (smallest == index) {
break;
}
swap(smallest, index);
index = smallest;
left = index * 2 + 1;
}
}
// 判断node是否进来过堆
private boolean isEntered(Node node) {
return heapIndexMap.containsKey(node);
}
// 判断某个节点是否在堆上
private boolean inHeap(Node node) {
return isEntered(node) && heapIndexMap.get(node) != -1;
}
private void swap(int index1, int index2) {
heapIndexMap.put(nodes[index1], index2);
heapIndexMap.put(nodes[index2], index1);
Node tmp = nodes[index1];
nodes[index1] = nodes[index2];
nodes[index2] = tmp;
}
}
// 使用自定义小根堆,改进后的dijkstra算法
// 从from出发,所有from能到达的节点,生成到达每个节点的最小路径记录并返回
public static HashMap<Node, Integer> dijkstra2(Node from, int size) {
// 申请堆
NodeHeap nodeHeap = new NodeHeap(size);
// 在堆上添加from节点到from节点距离为0
nodeHeap.addOrUpdateOrIgnore(from, 0);
// 最终的结果集
HashMap<Node, Integer> result = new HashMap<>();
while (!nodeHeap.isEmpty()) {
// 每次在小根堆弹出堆顶元素
NodeRecord record = nodeHeap.pop();
// 拿出的节点
Node cur = record.node;
// from到该节点的距离
int distance = record.distance;
// 以此为桥接点,找是否有更小的距离到该节点的其他to节点
// addOrUpdateOrIgnore该方法保证
// 如果from到to的节点没有,就add
// 如果有,看是否需要Ignore,如果不需要Ignore且更小,就Update
for (Edge edge : cur.edges) {
nodeHeap.addOrUpdateOrIgnore(edge.to, edge.weight + distance);
}
result.put(cur, distance);
}
return result;
}
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.